





















Привод дождевальных машин (оросительной установки) и автоматизация технологических процессов полива
Передвижение машины с позиции на позицию осуществляется с помощью электропривода. В состав электропривода входят мотор-редукторы, смонтированные на каждой из семнадцати опорных тележках, системы управления и сигнализации, а также силовые кабели. На рис. показан основной элемент привода машины — опорная тележка.
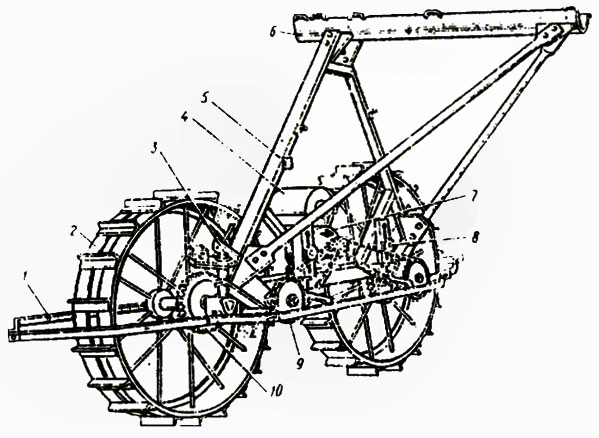
Опорная тележка представляет собой сварную пространственную раму из элементов трубчатого профиля, опирающуюся на два металлических колеса. Мощность мотор-редуктора каждой тележки 1,1 кВт, напряжение 230 В. Вращение колес осуществляется через пару цилиндрических зубчатых колес от промежуточного вала. Промежуточный вал, в свою очередь, приводится в движение от звездочек, расположенных на валу мотор-редуктора, при помощи цепных передач, смонтированных на тележке.
Электроснабжение привода обеспечивается от электрогенератора с ходоуменьшением, установленного на тракторе ЮМЗ-6М, с номинальной мощностью 44 кВт. Электрогенератор приводится в движение от вала отбора мощности трактора. Напряжение в сети 220 В, частота 50 Гц.
Для сохранения прямолинейности поливного трубопровода имеются специальные электрические синхронизирующие устройства с напряжением в сети 120 В, включающие конечные выключатели, магнитные пускатели и блоки ртутных переключателей. Механизм управления подсоединен ко всем тележкам, за исключением первой и последней.
Выравнивание движения промежуточных тележек выполняется автоматическим механизмом синхронизации, изображенном на рис.
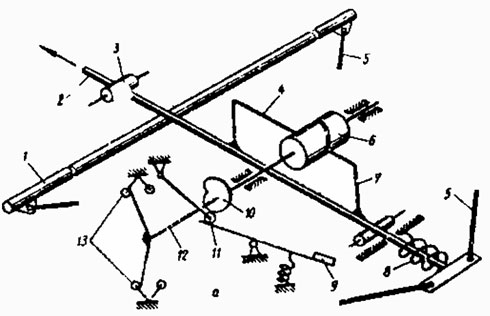
Если какая-либо тележка опережает соседние, то штанга смещается относительно изогнувшегося водопроводящего трубопровода в сторону, противоположную направлению движения машины, и с помощью троса поворачивает барабан, а вместе с ним и кулачковый вал, выключая тем самым верхний конечный выключатель. Выключатель отключает магнитный пускатель двигателя-редуктора и тележка останавливается. После выравнивания трубопровода штанга под действием пружины смещается вперед по ходу движения машины, двигатель-редуктор включается и тележка вновь начинается двигаться.
Если в результате нарушения работы электропривода тележки изгиб трубопровода становится недопустимым, то штанга поворачивает ртутный прерыватель и цепь размыкается. При этом на пульте управления гаснет лампочка и включается звуковой сигнал, требующий вмешательства машиниста-оператора.
Источник: В. Ф. Озерин «Автоматизация и привод дождевальных и поливных машин», Москва 1988, Ротапринт МИИСП им. Горячкина
Рис. Опорная тележка:
1 — стеблевод; 2 — колесо; 3 — ось; 4 — кожух мотор-редуктора; 5 — рама; 6 — желоб; 7 — мотор-редуктор; 8 — звездочка натяжная; 9 — цепная передача; 10 — передача зубчатая цилиндрическая.Опорная тележка представляет собой сварную пространственную раму из элементов трубчатого профиля, опирающуюся на два металлических колеса. Мощность мотор-редуктора каждой тележки 1,1 кВт, напряжение 230 В. Вращение колес осуществляется через пару цилиндрических зубчатых колес от промежуточного вала. Промежуточный вал, в свою очередь, приводится в движение от звездочек, расположенных на валу мотор-редуктора, при помощи цепных передач, смонтированных на тележке.
Электроснабжение привода обеспечивается от электрогенератора с ходоуменьшением, установленного на тракторе ЮМЗ-6М, с номинальной мощностью 44 кВт. Электрогенератор приводится в движение от вала отбора мощности трактора. Напряжение в сети 220 В, частота 50 Гц.
Для сохранения прямолинейности поливного трубопровода имеются специальные электрические синхронизирующие устройства с напряжением в сети 120 В, включающие конечные выключатели, магнитные пускатели и блоки ртутных переключателей. Механизм управления подсоединен ко всем тележкам, за исключением первой и последней.
Выравнивание движения промежуточных тележек выполняется автоматическим механизмом синхронизации, изображенном на рис.
Рис. Механизм управления машины «Днепр»:
1 — проводящий трубопровод; 2 — штанга; 3 — опорный ролик; 4 — трос; 5 — тяга штанги; 6 — барабан; 7 — подвеска; 8 — пружина; 9 — ртутный прерыватель; 10 —кулачок; 11 — рычаг сигнализирующего устройства; 12 — кулачковый вал; 13 — концевые выключатели. Стрелкой показано направление движения машины.Если какая-либо тележка опережает соседние, то штанга смещается относительно изогнувшегося водопроводящего трубопровода в сторону, противоположную направлению движения машины, и с помощью троса поворачивает барабан, а вместе с ним и кулачковый вал, выключая тем самым верхний конечный выключатель. Выключатель отключает магнитный пускатель двигателя-редуктора и тележка останавливается. После выравнивания трубопровода штанга под действием пружины смещается вперед по ходу движения машины, двигатель-редуктор включается и тележка вновь начинается двигаться.
Если в результате нарушения работы электропривода тележки изгиб трубопровода становится недопустимым, то штанга поворачивает ртутный прерыватель и цепь размыкается. При этом на пульте управления гаснет лампочка и включается звуковой сигнал, требующий вмешательства машиниста-оператора.
Источник: В. Ф. Озерин «Автоматизация и привод дождевальных и поливных машин», Москва 1988, Ротапринт МИИСП им. Горячкина

